

AP_Periph CAN Node L431
The AP_Periph CAN Node L431 is an adapter module based on ArduPilot AP_Periph firmware, designed to convert DShot-capable ESCs into CAN ESCs with full telemetry support and to transform PWM servos into CAN servos. This compact and lightweight module enhances communication efficiency in UAV and robotics applications, offering seamless integration with CAN-based systems.
AP_Periph CAN Node L431 - an adapter that changes the rules of the game!
- CAN-L4-PWM is an Adapter Node based on ArudPilot AP_Periph firmware.
- Using this adapter to turn DShot capable ESCs into CAN ESCs, including full ESC telemetry. and turn PWM servos into CAN servos.
Specification of AP_Periph CAN Node L431
- MCU: STM32L431xC, 256KB Flash
- 1x CAN, DroneCAN Protocol
- 9x PWM outputs (8x Dshot)
- 1.5x UARTs
- UART1, RX1
- UART3, Tx3/ Rx3
- ST debug, SWCLK & SWDIO
- LED
- Blue, Fast blinking, Booting
- Blue, Slow blinking, working
- Red, 3.3V indicator
- Input voltage range: 4.5~5.5V @5V pad/pin
- Power consumption: 30mA
- Operating Temperatures: -20~80 °C
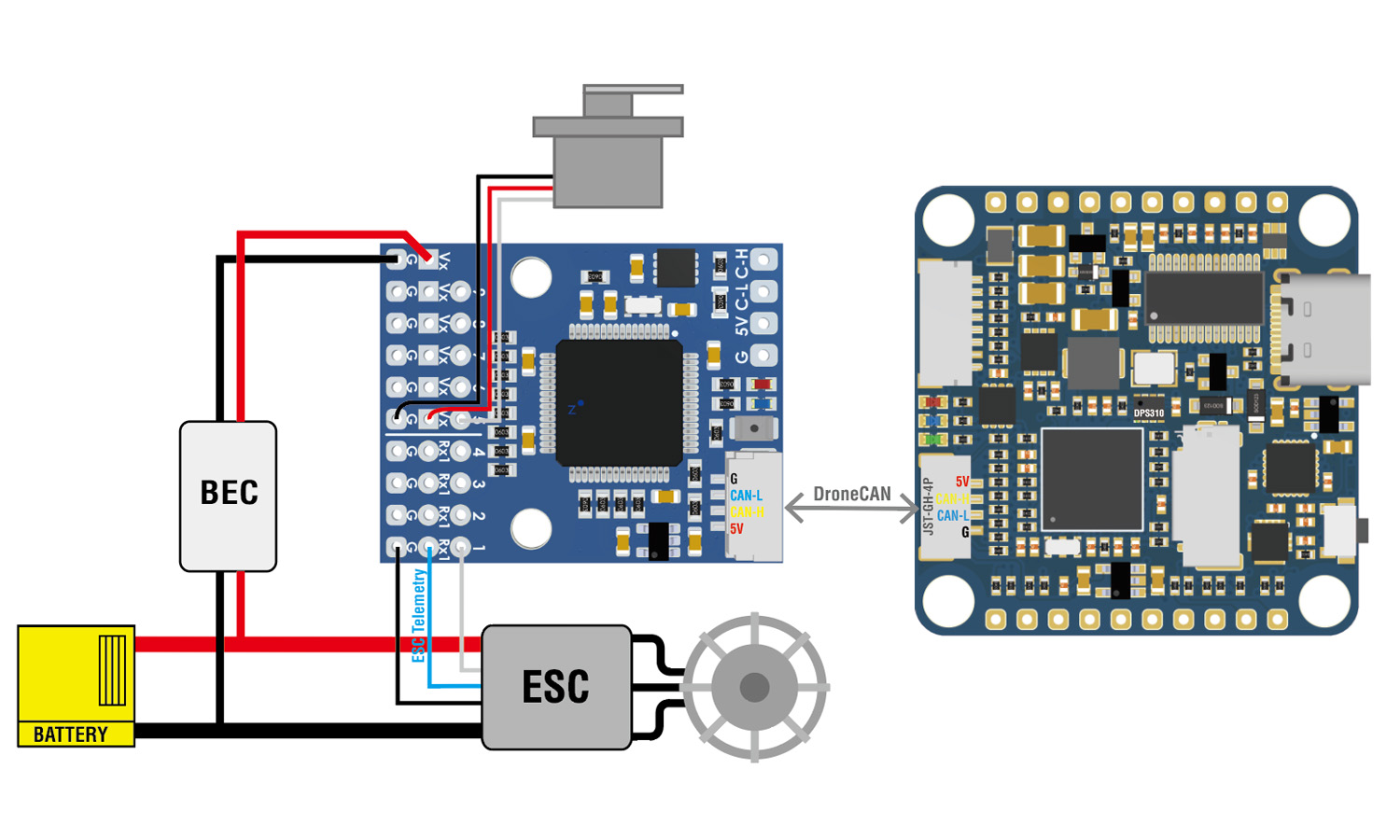
- “Vx” pads are for powering servos via external BEC. “Vx” is not connected to other components on this board.
- “Rx1” pads are for ESC Telemetry, DO NOT connect ESC BEC output to Rx1 pad.
- Physical
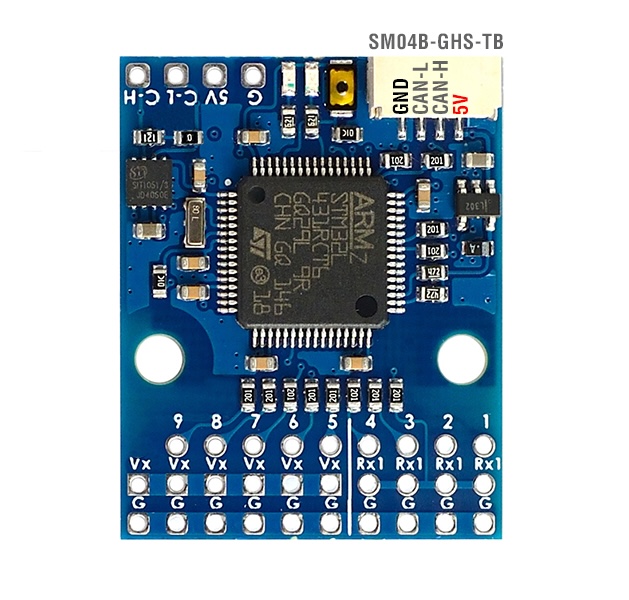
- 1x JST-GH-4P(SM04B-GHS-TB) for CAN
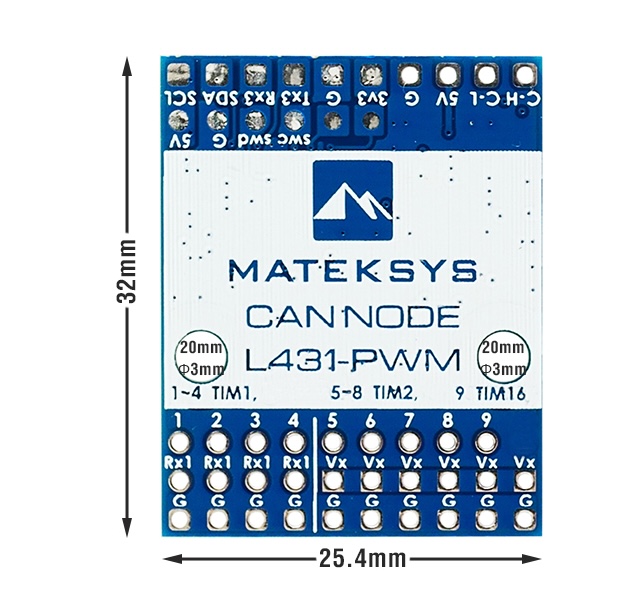
- Board Size: 32mm*25.4mm. 3.5g
- Mounting: 20mm. Dia.3mm
- Firmware
- ArduPilot AP_Periph MatekL431-Dshot
- Update via DroneCAN GUI Tool
Parameters of AP_Periph CAN Node L431
SLCan Mode CAN1 > | Parameters | Default Parameters | |||
PWM | 1 | PA8 | TIM1_CH1 | OUT1_FUNCTION | 33 |
PWM | 2 | PA9 | TIM1_CH2 | OUT2_FUNCTION | 34 |
PWM | 3 | PA10 | TIM1_CH3 | OUT3_FUNCTION | 35 |
PWM | 4 | PA11 | TIM1_CH4 | OUT4_FUNCTION | 36 |
PWM | 5 | PA15 | TIM2_CH1 | OUT5_FUNCTION | 51 |
PWM | 6 | PA2 | TIM2_CH3 | OUT6_FUNCTION | 52 |
PWM | 7 | PA3 | TIM2_CH4 | OUT7_FUNCTION | 53 |
PWM | 8 | PA1 | TIM2_CH2 | OUT8_FUNCTION | 54 |
PWM | 9 | PA6 | TIM16_CH1 NO DMA | OUT9_FUNCTION | 55 |
UART | RX1 | UART1 | Serial PORT 0 | ESC_TELEM_TYPE | 0 |
UART | TX3 RX3 | UART3 | Serial PORT 2 | USER | |
ESC_PWM_TYPE | 7 | ||||
OUT_BLH_OTYPE | 6 | ||||
OUT_BLH_MAS | 16 |
Parameters in the flight controller (autopilot)
- CAN_D1_PROTOCOL = 1
- CAN_P1_DRIVER = 1
- CAN_D1_UC_ESC_OF = 4 (Plane 4.2.1 or newer)
- CAN_D1_UC_ESC_BM = x
- CAN_D1_UC_SRV_BM = x
- BRD_SAFETYENABLE = 0 (if your flight controller doesn’t have safety pin)
What's included in the AP_Periph CAN Node L431
- 1x CAN-L4-PWM
- 1x silicone cabel JST-GH-4P to JST-GH-4P 20cm