CAN-L4-BM ultra precyzyjny cyfrowy monitor zasilania!
CAN-L4-BM to ultra precyzyjny cyfrowy monitor zasilania oparty na oprogramowaniu TI INA239 i ArudPilot AP_Periph.
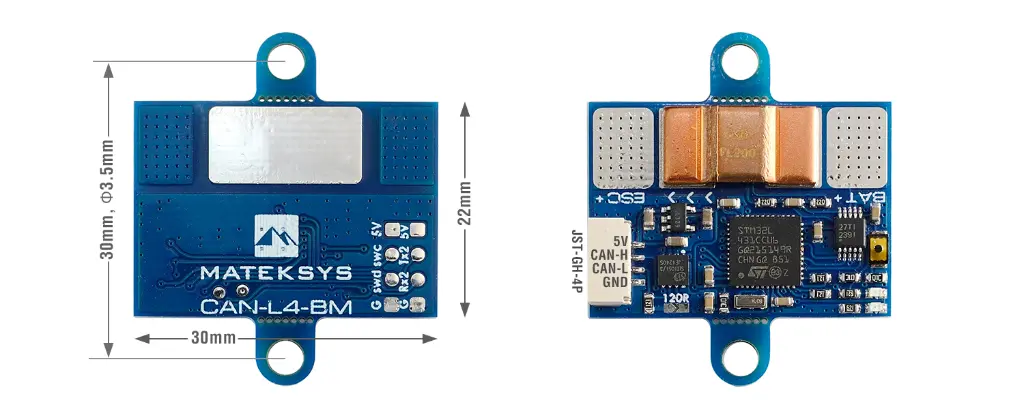
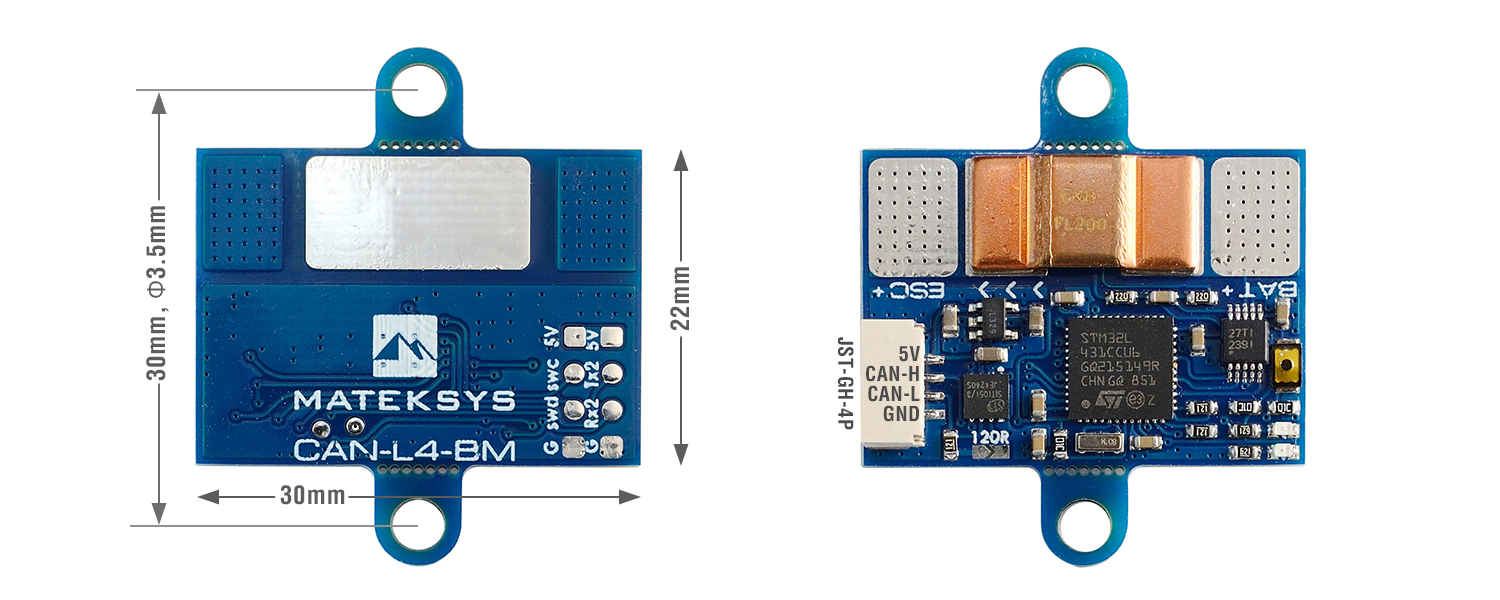
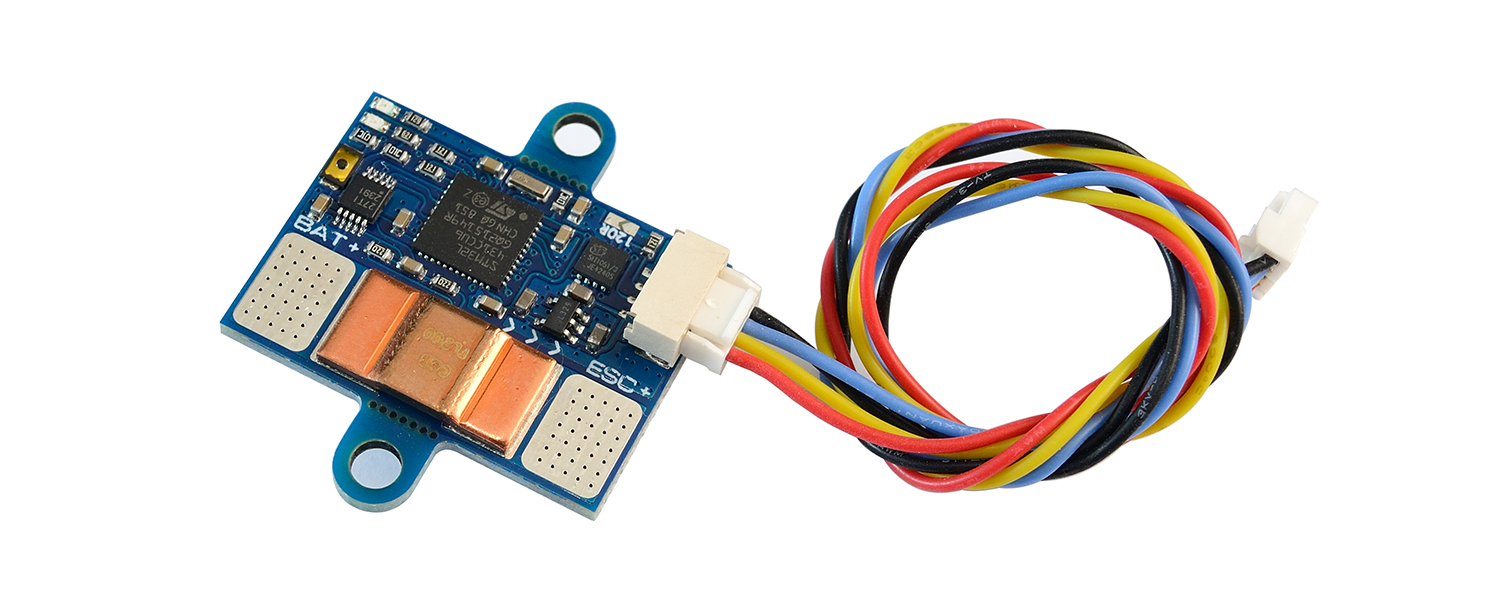
Rezystancja tej ścieżki przewodzącej wynosi typowo 200 μΩ, zapewniając niskie straty mocy w aplikacji.
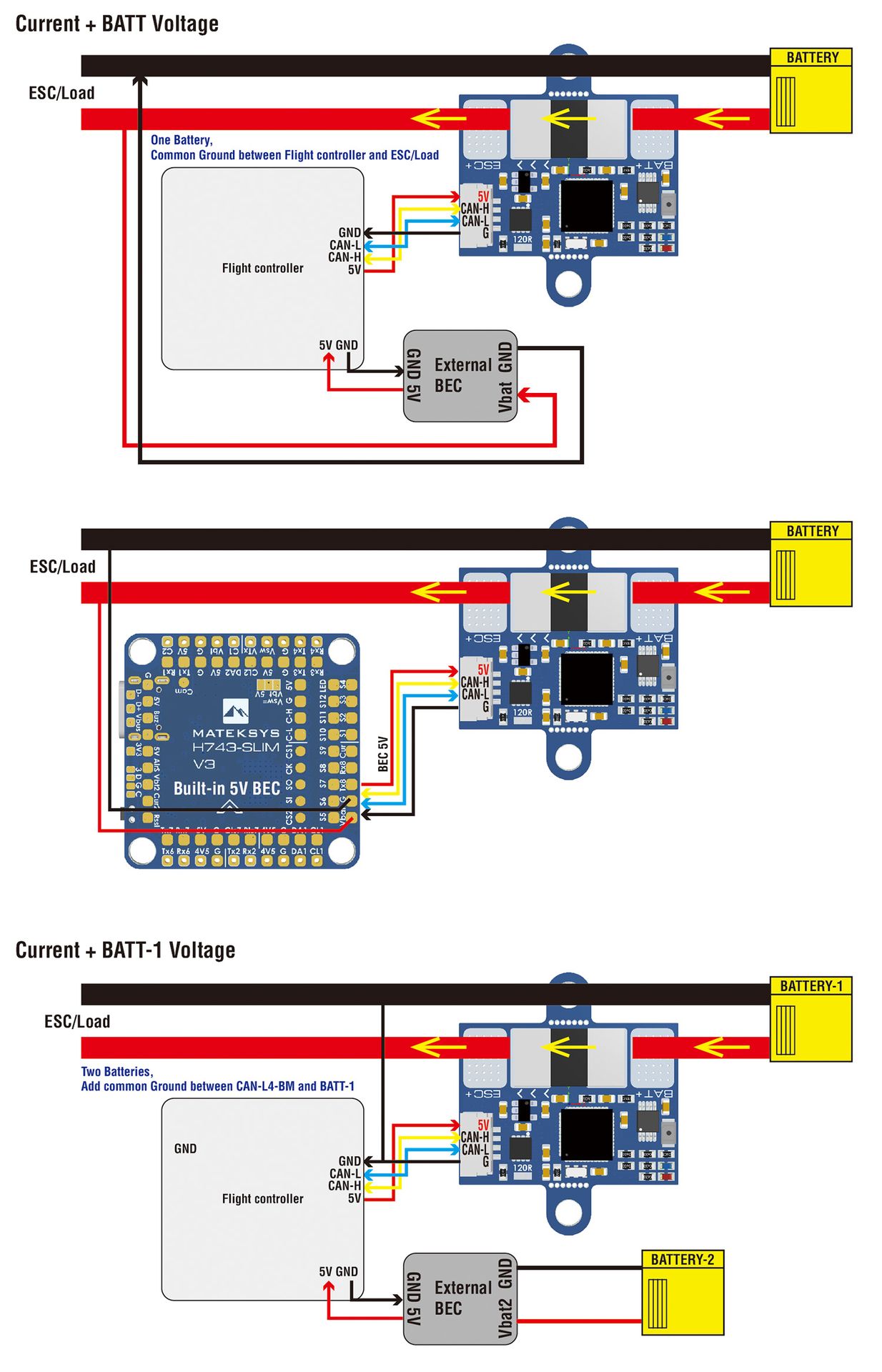
Dzięki temu urządzeniu nie jest wymagana kalibracja, a kontroler lotu obsługujący protokół DroneCAN może z łatwością uzyskać dokładne odczyty prądu i napięcia magistrali za pośrednictwem magistrali CAN.
SPECYFIKACJE
MCU: STM32L431xC, 256KB Flash
INA239 85-V, 16-bitowy, precyzyjny układ scalony monitora zasilania z interfejsem SPI
Wejście wykrywania napięcia akumulatora: 0~85V
Zakres wykrywania prądu: 0~204.8A
Prąd obciążenia rezystora wykrywającego prąd: 150 A (ciągły), 204,8 A (burst)
Dokładność napięcia: ± 0,1%
Dokładność prądu: ± 2%
Interfejs
- CAN, protokół DroneCAN
- UART2, zapasowy, DFU
- Debug ST, SWCLK i SWDIO
DIODA LED
- Niebieska, szybko migająca, uruchamianie
- Niebieski, wolno migający, praca
- Czerwona, wskaźnik 3,3 V
Zasilanie płyty CAN-L4-BM: 4,5~5,5V @5V pad/pin
Pobór mocy: 10mA
Temperatura pracy: -40~85 °C
Fizyczne
- Rozmiar płytki: 30mm*22mm*3mm. 4g
- Plik 3D: CAN-L4-BM_STEP.zip
Firmware
- ArduPilot AP_Periph MatekL431-BattMon
- Aktualizacja przez narzędzie GUI DroneCAN
Parametry
- CAN_P1_DRIVER = 1 jeśli podłączony do portu CAN bus1 lub CAN_P2_DRIVER = 1 jeśli podłączony do portu CAN bus2
- BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
W ZESTAWIE
1x płytka CAN-L4-BM
1x przewód silikonowy JST-GH-4P do JST-GH-4P 20 cm
WSKAZÓWKI
- Duży pad na dole to martwy pad. Nie ma na nim żadnej sieci obwodów.
- Przewody dodatnie należy przylutować jak najbliżej obu stron rezystora wykrywającego prąd.
- 2 uszy do montażu można odciąć, jeśli nie są potrzebne.
- Jeśli przewody CAN są zbyt długie, zmostkuj zworkę "120R".