Autopilot The Cube Orange
jest najnowszym i najbardziej wydajnym modelem w ekosystemie Cube Pilot przeznaczonym przede wszystkim dla producentów systemów komercyjnych.
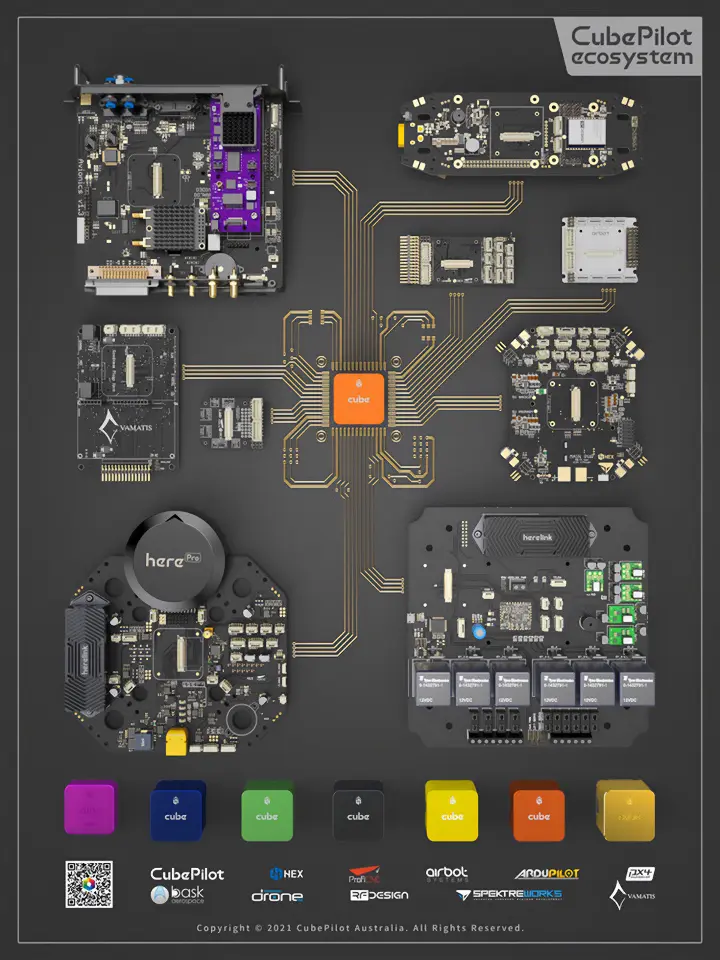
Cube Pilot jest projektem mającym na celu dostarczenie ekosystemu Hadware i Software dla ciągle rozwijającego się przemysłu systemów bezzałogowych. Cube Pilot umożliwia dopasowanie systemu do konkretnego zastosowania co pozwala wydobyć wszystko co najlepsze z najnowocześniejszej technologii. Ze strukturą Open Source i społecznością jako duszą, niezawodnością i jakością jako charakterem, Cube Pilot nieustannie wprowadza na rynek wysokiej jakości sprzęt. Ekosystem Cube Pilot składa się obecnie z serii Cube Autopilot służącej jako rdzeń systemu z szeroką gamą różnych akcesoriów oraz płyt nośnych opracowanych przy ogromnym wsparciu społeczeństwa i przemysłu.
Autopilot jest zaprojektowany do użycia z płytą nośną zbudowaną konkretnie dla danej dziedziny w celu zmniejszenia ilości okablowania, poprawy niezawodności i łatwości montażu.
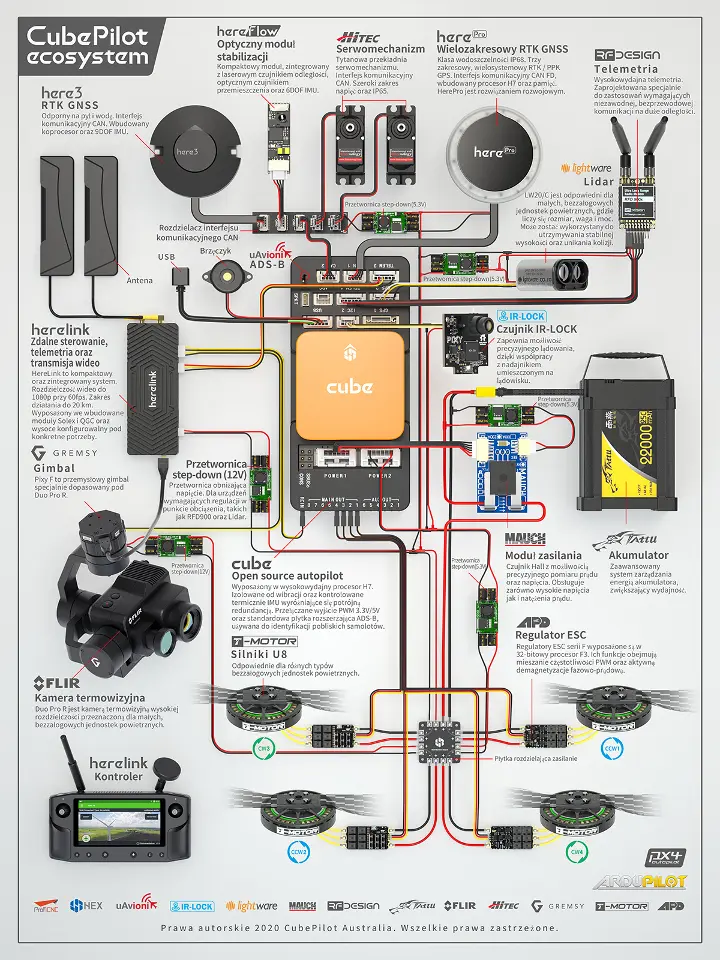 CubePilot Ecosystem Źródło: www.ardupilot.org
CubePilot Ecosystem Źródło: www.ardupilot.org
Cechy systemu
Autopilot Cube Orange jest najnowszym i najbardziej wydajnym modelem w ekosystemie Cube Pilot. Zaprojektowany dla użytkowników hobbystycznych, komercyjnych integratorów systemów i producentów UAS. Cube Orange jest częścią szerokiego ekosystemu modułów autopilotów i płyt nośnych. Wszystkie modele Cube są kompatybilne ze wszystkimi nośnikami, co pozwala użytkownikom wybrać płytę nośną, która najlepiej odpowiada ich potrzebom.
Cube Orange jest dostępny jako samodzielny moduł lub jako pakiet z nową zaktualizowaną wersją oryginalnej płyty nośnej, która zawiera zintegrowany moduł ADS-B In z uAvionix. W naszym sklepie posiadamy dwie opcje produktu.
 PixHawk Orange Cube standard set Źródłó: www.mybotshop.de
PixHawk Orange Cube standard set Źródłó: www.mybotshop.de
Parametry The Cube Orange
W pełni kompatybilny ze wszystkimi płytami nośnymi Cube Pilot, wszystkie wejścia i wyjścia przechodzą przez 80-pionowe złącze DF17, co pozwala na rozwiązanie plug&play dla producentów systemów komercyjnych. Producenci mogą projektować własne płyty nośne, aby dostosować je do swoich specyficznych potrzeb swoich systemów bezzałogowych
- Szybszy procesor H7 SOC z 1MB ram
- Ulepszone potrójne redundantne czujniki IMU
- IMU jest kontrolowane pod względem temperatury przez wbudowane oporniki grzewcze, co pozwala na optymalną temperaturę pracy IMU
- Cała jednostka zarządzania lotem (FMU) oraz inercyjna jednostka pomiarowa (IMU) są umieszczone w stosunkowo małej obudowie (kostka). (https://ardupilot.org)
- Cube posiada wibroizolację na dwóch jednostkach IMU, z trzecią stałą jednostką IMU jako referencyjną / zapasową. (https://docs.px4.io/)
 Cube Orange Flight Controller Źródło: www.docs.px4.io
Cube Orange Flight Controller Źródło: www.docs.px4.io
Płyta nośna ADS-B
Nowa płyta nośna ADS-B jest identyczna z wersją standardową, a główne zmiany w porównaniu z oryginalną płytą nośną są następujące:
- Integracja z odbiornikiem uAvonix ADS-B IN
- Wbudowana antena ADS-B
- Usunięte porty Intel Edison Bay i Debug USB
Wyjścia PWM
Cube posiada osiem wyjść PWM, które są podłączone do kontrolera IO i mogą być kontrolowane przez kontroler IO bezpośrednio przez wejście R/C, nawet jeśli FMU nie jest aktywne (failsafe / tryb ręczny). Obsługiwana szybkość sygnału PWM sięga do 400Hz.
Wszystkie wyjścia PWM są zabezpieczone przed EDS, a ich konstrukcja pozwala przetrwać przypadkowe błędne podłączenie serwomechanizmów bez ich uszkodzenia. Sterowniki serw są przystosowane do pracy z obciążeniem wejściowym serwomechanizmu 50pF na długości 2m przewodu 26AWG.
Płyta bazowa - Carierboard
Oryginalna płyta bazowa posiada oddzielne złącza dla każdego z portów peryferyjnych (z kilkoma wyjątkami).
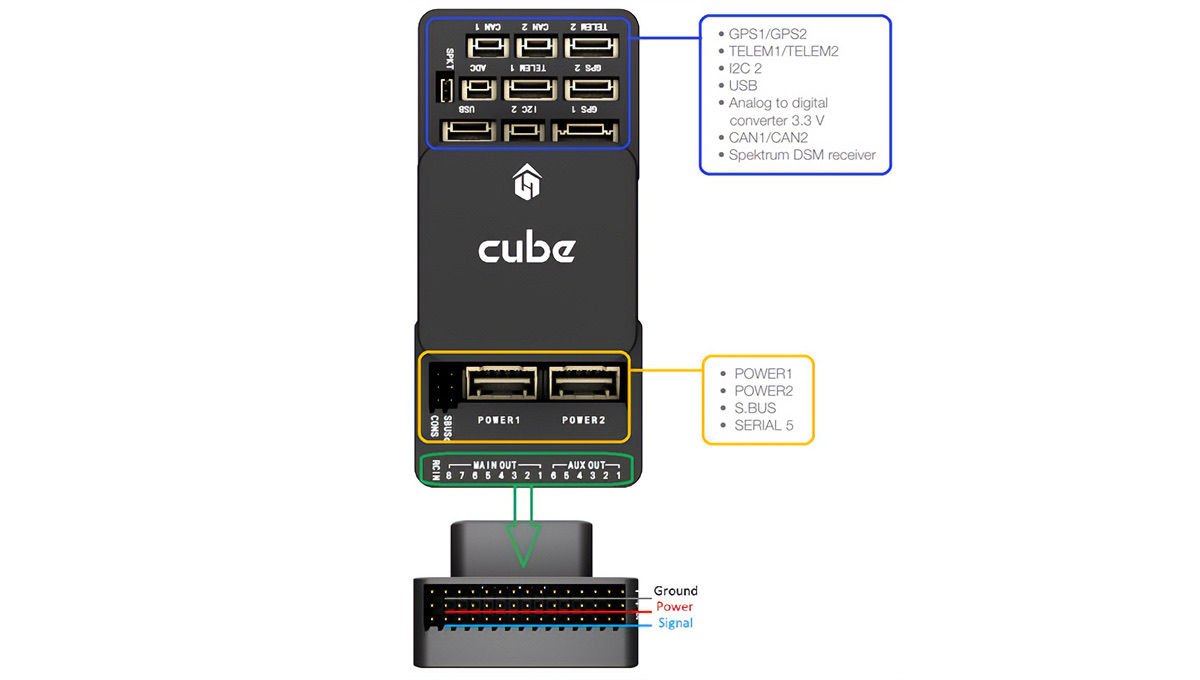 top-side (GPS, TELEM etc) Źródłó: https://docs.px4.io
top-side (GPS, TELEM etc) Źródłó: https://docs.px4.io
Architektura zasilania
The Cube zapewnia kierowanie zasilaniem, wykrywanie i ochronę przed zbyt wysokim lub zbyt niskim napięciem, filtrowanie, przełączanie, ograniczanie prądu i tłumienie stanów przejściowych dla urządzeń peryferyjnych. Wyjścia zasilania urządzeń peryferyjnych posiadają filtry ESD i EMI. Zasilanie jest odłączane od urządzeń peryferyjnych, gdy dostępne napięcie zasilania spadnie poniżej 2,7V lub wzrośnie powyżej 5,7V.
 The Cube Orange Standard Set Źródło: www.worldronemarket.com
The Cube Orange Standard Set Źródło: www.worldronemarket.com
Inne cechy zasilania
- Pojedyncze, niezależne zasilanie 5V dla kontrolera lotu i urządzeń peryferyjnych.
- Integracja z „2 power bricks” lub kompatybilną alternatywą, w tym wykrywanie prądu i napięcia.
- Niski pobór mocy i odprowadzanie ciepła.
- Dystrybucja i monitorowanie mocy dla urządzeń peryferyjnych.
- Ochrona przed typowymi błędami w okablowaniu; zabezpieczenie pod/nadnapięciowe, nadprądowe, termiczne.
- Odporność na wyładowania łukowe i ich wykrywanie.
Zasilanie dodatkowe
Cube posiada port zasilania dodatkowego; jest on ustawiony tak samo jak główne wejście zasilania. Przy napięciu wejściowym powyżej 5.7V zasilanie jest blokowane. Cube i urządzenia peryferyjne mogą pobierać do 2.75A podczas pracy na zasilaniu dodatkowym, pod warunkiem, że inne źródło zasilania może dostarczyć wymagany prąd.
Zasilanie z USB
Obsługiwane dla celów aktualizacji oprogramowania, testowania i rozwoju. Zasilanie USB jest dostarczane do portów peryferyjnych w celach testowych, jednak całkowity pobór prądu musi być zazwyczaj ograniczony do 500mA, łącznie z peryferiami, aby uniknąć przeciążenia portu USB hosta.
Zapas kondensatorów
Zarówno mikrokontrolery FMU jak i IO posiadają podtrzymywane kondensatorem zegary czasu rzeczywistego oraz pamięć SRAM. Zapasowy kondensator na pokładzie ma pojemność wystarczającą do zamierzonego użycia zegara i pamięci SRAM, która ma zapewnić przechowywanie danych w celu umożliwienia odzyskania kontroli po niezamierzonej utracie zasilania lub innych sytuacjach powodujących restart w powietrzu. Kondensatory są ładowane z szyny 3,3V FMU. będzie to działać tylko w przypadku gdy oprogramowanie wspiera tą funkcję.
Napięcie, prąd i wykrywanie błędów
Nadmierny prąd na portach zasilania urządzeń peryferyjnych może być wykryty przez FMU. Blokada sprzętowa zapobiega uszkodzeniom spowodowanym trwałym zwarciem na tych portach. Blokada może być resetowana przez oprogramowanie FMU.
Filtrowanie EMI jest zapewnione w kluczowych punktach systemu przy użyciu filtrów przelotowych o dużej stratności. Filtry te są połączone z diodami TVS na złączach peryferyjnych w celu tłumienia przejściowych napięć zasilania.
Na każdym z wejść zasilania znajduje się zabezpieczenie przed odwrotną polaryzacją. Sygnały USB są filtrowane i przerywane za pomocą połączonej matrycy terminatorów/TVS.
Większość cyfrowych sygnałów peryferyjnych (wszystkie wyjścia PWM, porty szeregowe, port I2C) są sterowane za pomocą buforów wzmocnionych ESD i posiadają szeregowe rezystory blokujące, aby zmniejszyć ryzyko uszkodzenia z powodu przypadkowych połączeń. (https://docs.cubepilot.org)
 CubePilot Żródło: www.unmannedtechshop.co.uk
CubePilot Żródło: www.unmannedtechshop.co.uk
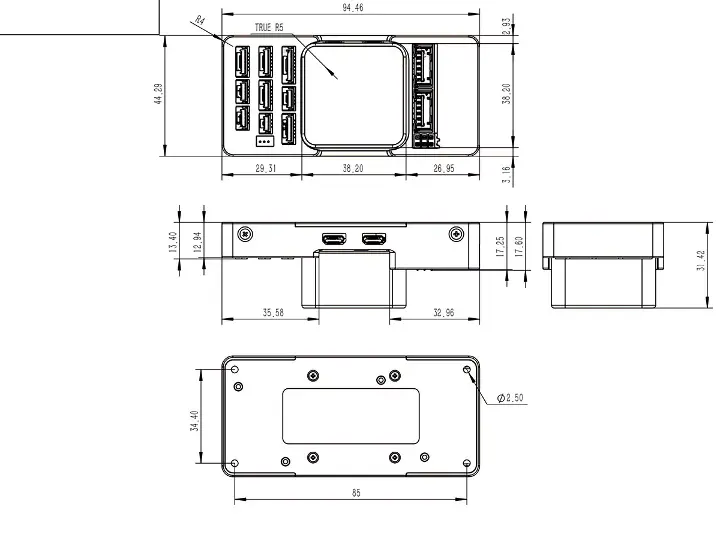
Specyfikacja techniczna
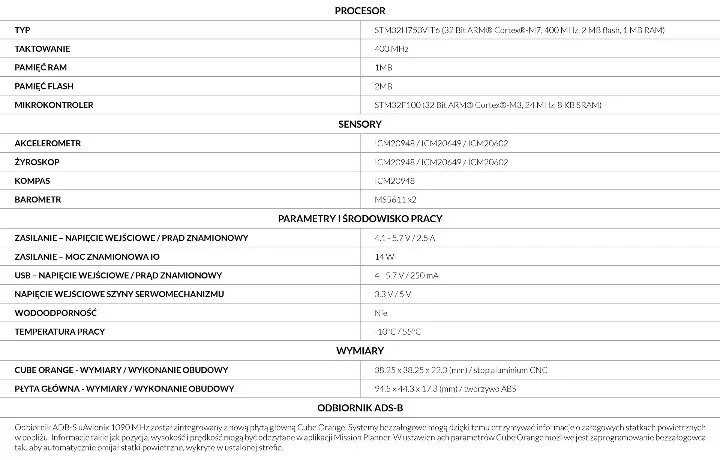 Źródło: www.drony.net
Źródło: www.drony.net
Porównanie The Cube’s
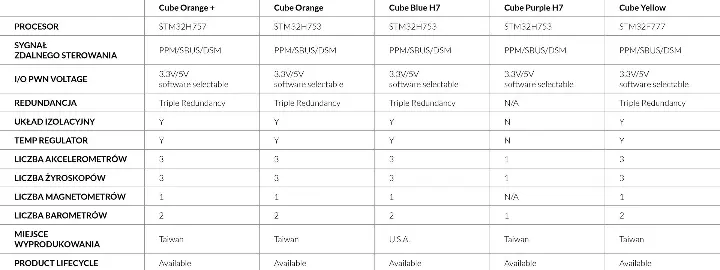
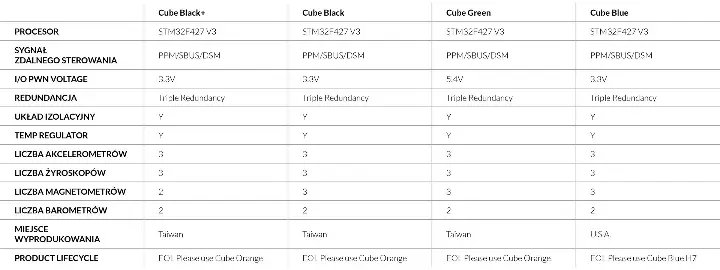 Tabela porównawcza The Cube’s Źródło: https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Tabela porównawcza The Cube’s Źródło: https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Porównując the Cube Orange do innych poprzedników, należy podkreślić, że The Cube Black jest wersją bazową. Kontrolery lotu The Cube posiadają wspólną obudowę, ale są różne od środku. Jedyny moduł, który jest mniejszy w wymiarach to jest the Cube Purple, dlatego że nie posiada izolowanego IMU. Wszystkie The Cube’s są równie kompatybilne z tymi samymi płytami bazowymi.
The Cube Orange model jest ulepszoną wersją bazowego the Cube Black i jest najmocniejszym modelem wśród innych w chwili obecnej, który jest w stanie zapewnić o wiele więcej funkcji autopilotu w przyszłości.
Bibliografia
https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#pwm-outputs [Dostęp: 29.08.2022]
https://www.mybotshop.de/Pixhawk-Orange-Cube-Standard-Set_1 [Dostęp: 29.08.2022]
https://docs.px4.io/main/en/flight_controller/cubepilot_cube_orange.html [Dostęp: 29.08.2022]
https://docs.cubepilot.org/user-guides/ [Dostęp: 29.08.2022]
https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview [Dostęp: 29.08.2022]
https://ardupilot.org/copter/docs/common-thecubeorange-overview.html [Dostęp: 29.08.2022]