-
Zobacz teren w szerszej perspektywie
Loty dronami dlaWykorzystaj bezzałogowe systemy latające UAS do inwentaryzacji upraw, terenów leśnych, budowli i inwestycji.
Kontakt
-
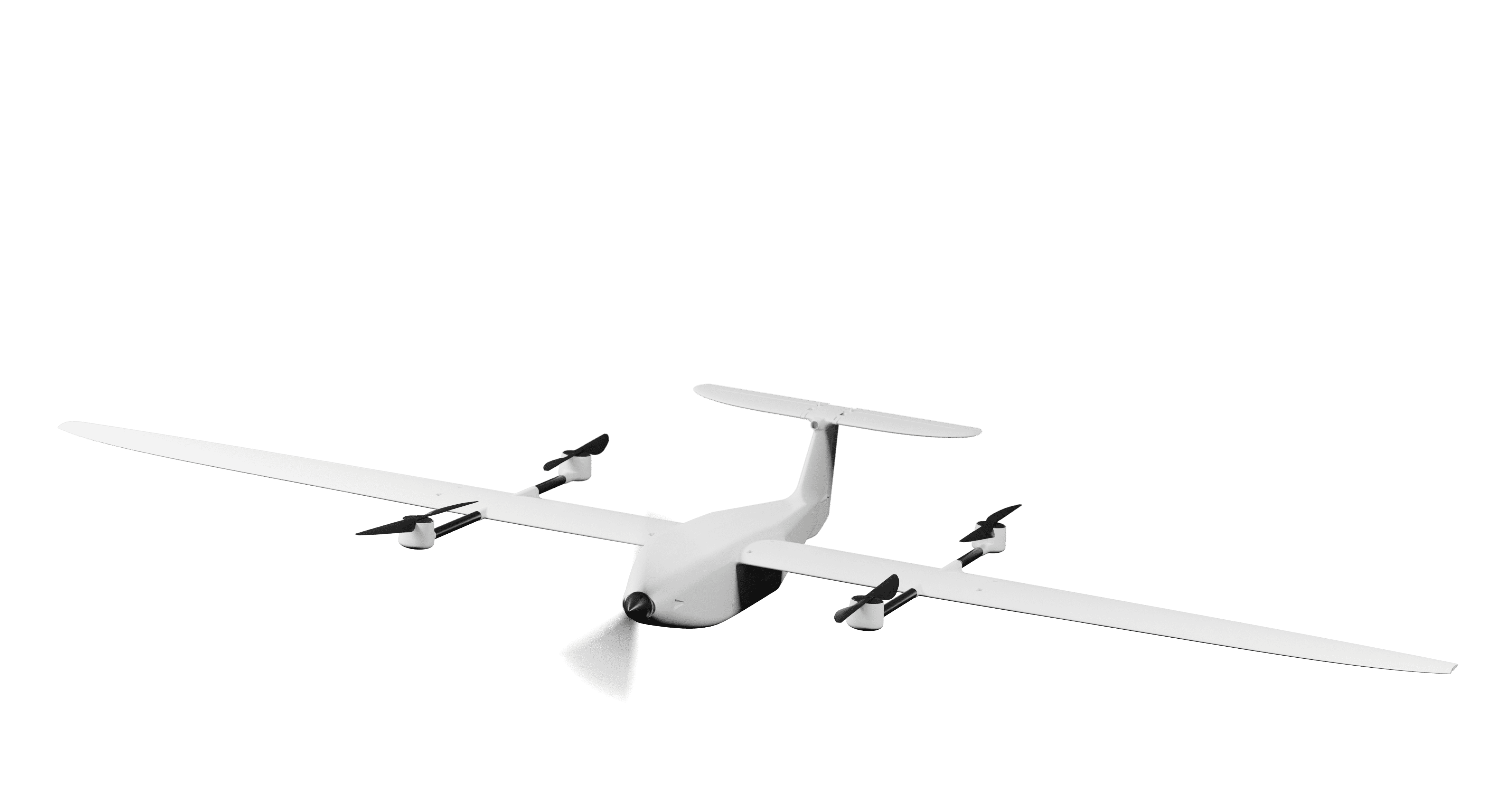
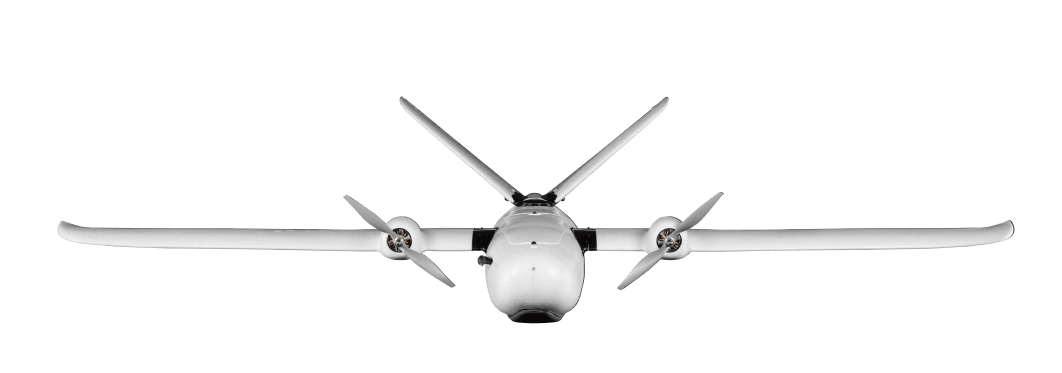
Wybierz swój żywioł




Profesjonalne Systemy Bezzałogowe dalekiego zasięgu.
Monitorujesz duże obszary?
Czas lotu konwencjonalnych wielowirnikowych dronów jest zbyt krótki?
Sprawdź rozwiązania dedykowane dla profesjonalistów.

Oni nam zaufali!
Najlepszym tego dowodem, są opinie naszych klientów.
-
Obszar objęty inwentaryzacją wyniósł łącznie 410 tys. hektarów.
Zidentyfikowano 137125 lokalizacji chorych i martwych drzew, uzyskując zgodność (potwierdzoną w kontroli naziemnej) na poziomie ponad 80%. Uzyskane dane pozwoliły nam opracować strategię skutecznej walki z kornikiem ostrozębnym i innymi szkodnikami drzew iglastych.MARTA WILER, Regionalna Dyrekcja Lasów Państwowych w Zielonej Górze -
BZB UAS gościliśmy w programie akceleracji MIT Enterprise Forum Poland. W czasie projektu współpracowali z firmą PGNiG, dla której opracowali bezzałogowy system powietrzny. Maszyna, którą wykonali, pomyślnie przeszła testy nad infrastrukturą partnera.
MAGDALENA JABŁOŃSKA, FUNDACJA PRZEDSIĘBIORCZOŚCI TECHNOLOGICZNEJ -
Szkolenie "Zdrowy Las" opierało się na rzeczywistych przykładach, przedstawione w sposób zrozumiały i szczegółowy. Kontakt z instruktorami to czysta przyjemność. Posiadają bardzo szeroką wiedzę specjalistyczną i cechują się czytelną w odbiorze metodyką prowadzenia zajęć, to ludzie z pasją
ANNA KULIK, Nadleśnictwo Świeradów -
Jako opiekun koła naukowego miałem okazję na bieżąco obserwować pracę panów Jana i Kacpra. Z pełną odpowiedzialnością polecam ich jako firmę BZB UAS. Z pewnością sprostają oni wielu ambitnym zadaniom.
DR INŻ. WIESŁAW WĘDRYCHOWICZ, POLITECHNIKA WROCŁAWSKA -
1085,28 hektarów, 421 lokalizacji chorych i martwych drzew.
Właściwa interpretacja BZB UAS przyczyniła się do zinwentaryzowania stanu sanitarnego lasu oraz rozpoznania lokalizacji ognisk potencjalnych zagrożeń płynących głównie ze strony szkodników wtórnych.TOMASZ GAJDA, Nadleśnictwo Jawor -
Bardzo rzetelne i kompleksowe podejście do zlecenia. Wynik pomiarów pozytywnie nas zaskoczył. Inspekcja powierzchni leśnych i inwestycyjnych z wykorzystaniem dronów to przyszłość. Zlecenie wykonane błyskawicznie, cenowo bardzo atrakcyjnie w porównaniu do pracochłonności ludzi. Polecamy!
MAREK MACIEJEWSKI, Woodfast Tree Management -
BZB UAS polecam na 100% z nimi żadne loty nie są straszne. Dobrze przygotują do samodzielnego operowania bsp i zawsze są gotowi do pomocy.
RAFAŁ IWASIECZKO, OSP Jarogniewice











Chcesz wiedzieć więcej o usługach oferowanych przez BZB UAS?
Wspólnie zastanowimy się, jak możemy Tobie pomóc .
Kontakt